
函数默认参数
int func(int a = 100, char c = 'h');
参数列表显式初始化后,调用的时候可以按照顺序选择不传递参数,此时函数会采用默认值。
Output parameter
除了tuple和pair,另一种返回多个值的方法是:传入参数时使用引用,这样就可以直接在函数里改变变量值,而不用返回。
文件流
参照CS106L stringstream操作,很相似。
collections
Vector:灵活的数组
grid:灵活的二维数组
允许创建collection的collection
linkedlist:链表,插入比vector更快,但占用内存多,且查询访问慢
stack:栈
queue:队列
Recursion
解决此类问题的时候,尽量避免arm's length recursion,同时先判断base case,再解决递归。
Avoid arm's length:只关注本节点的东西
搞清楚此类问题是permutation(排列)还是sublist(子列),两者所需递归次数不同。
C++ STL sequence vector工作方式
根据初始化,动态申请一个内存区域(C++数组)。
有两个表示容量的变量:size和capacity,size代表当前存储的数据数量,capacity代表当前动态数组能存储的最大数量。
当进行push操作时,若size已经达到capacity上限,则进行扩容:申请一片新的内存,将原来数据复制到新内存,再进行push操作。
Priority queue
根据权重,出队列的第一个是最优先的元素。
Implement methods
sorted/unsorted array
sorted/unsorted linkedlist
heap
树结构,root为最优先元素。
使用顺序容器存储,root下标为1,父节点下标为n/2,子节点下标为n2和n2 + 1。
父节点永远比子节点优先。
当插入新元素时,先将新元素放在最后,再将其与父节点比较,根据优先级进行交换(递归过程)。
当出队列时,将最后的元素放到root节点上,再与子节点比较,根据优先级进行交换(递归,与weight最小的子节点进行交换)。
操作复杂度为O(logN)。
Heap是一种特殊的二叉树,因为除了最后一层,其他层级都是满的。
BST:binary search tree
set和map的底层原理。
root节点的左子节点总比root小,右子节点总比root大。
remove
没有子节点的,直接移除。
只有左节点或者只有右节点的,移除自身后,将子节点放到自身位置。
既有左节点又有右节点的,移除自身后,将左子树的最大值或者右子树的最小值放到自身位置,并且易知左子树的最大值或者右子树的最小值是前两种情况之一。
如果需要平衡,详见红黑树。
BST和快速排序的相像之处
Trie
用于字符串存储检索。 节点结构为{bool flag; Node* nexts[26];} 二十六个子节点分别代表二十六个字母。
Huffman Coding
一种编码方式,相对于ASCII码能够节省空间(对出现频次高的字符分配较短的码)。 各字符编码长度的不统一,要求编码必须是prefix free coding,huffman coding就是寻找最佳的prefix free coding的一种方法。
算法
构建一个存储树的pqueue。
将原始文本的每个互不相同的字符作为单独的树节点添加到pqueue里去,权重为frequency。
当pqueue内元素大于等于两个时:
取前两个元素,将它们结合形成新树,父节点的0和1指针分别指向这两个元素,新树的权重为两个子树权重之和,再把新树重新入队列。
DFS
使用递归结构搜索。
BFS
借助Queue,逐层进行搜索。
dijkstra
借助PQueue,进行最短路计算。
算法
初始化:将起点入队。起点cost为0,其他点cost为无穷大。
当队列不为空:
出队列,标记该点,对于该元素的(未被标记的)邻接点:
计算从当前点到该邻接点的costTemp。
将costTemp与该邻接点的cost比较,并将cost替换为较小的cost,修改该邻接点的previousVertex。
最后:若要输出路径,则可从终点通过previousVertex一路追踪。
相关:贪心,DP,记忆化,子问题。
A*
通过更改PQueue的排序依据,在dijkstra基础上实现启发式搜索,只需将上述的cost,更改为cost + H,H为启发式函数,用来进行搜索优先级引导。
MST
Spanning tree
图连通,且无环。 例如,解决城市供应链问题(disaster planning)。
寻找MST(所有边权重和最小)算法
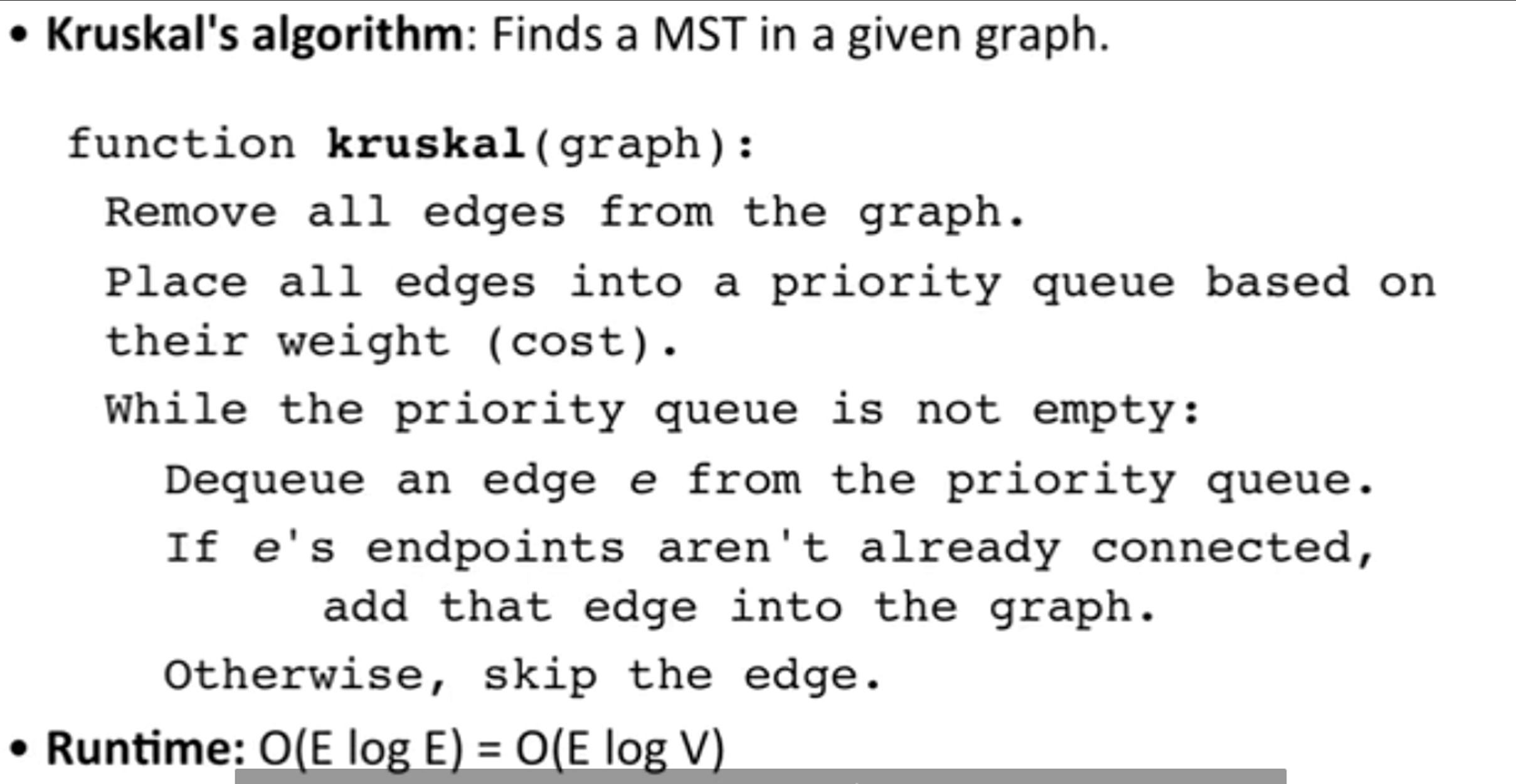
如何判断两个点是否连通?
无需每次都进行搜索,使用cluster方法。
一开始每一个点都在一个cluster里,当添加新边时,合并两个端点所在的cluster。
判断连通时,也只需判断一个端点的cluster是否包含另一个端点。使用set实现。
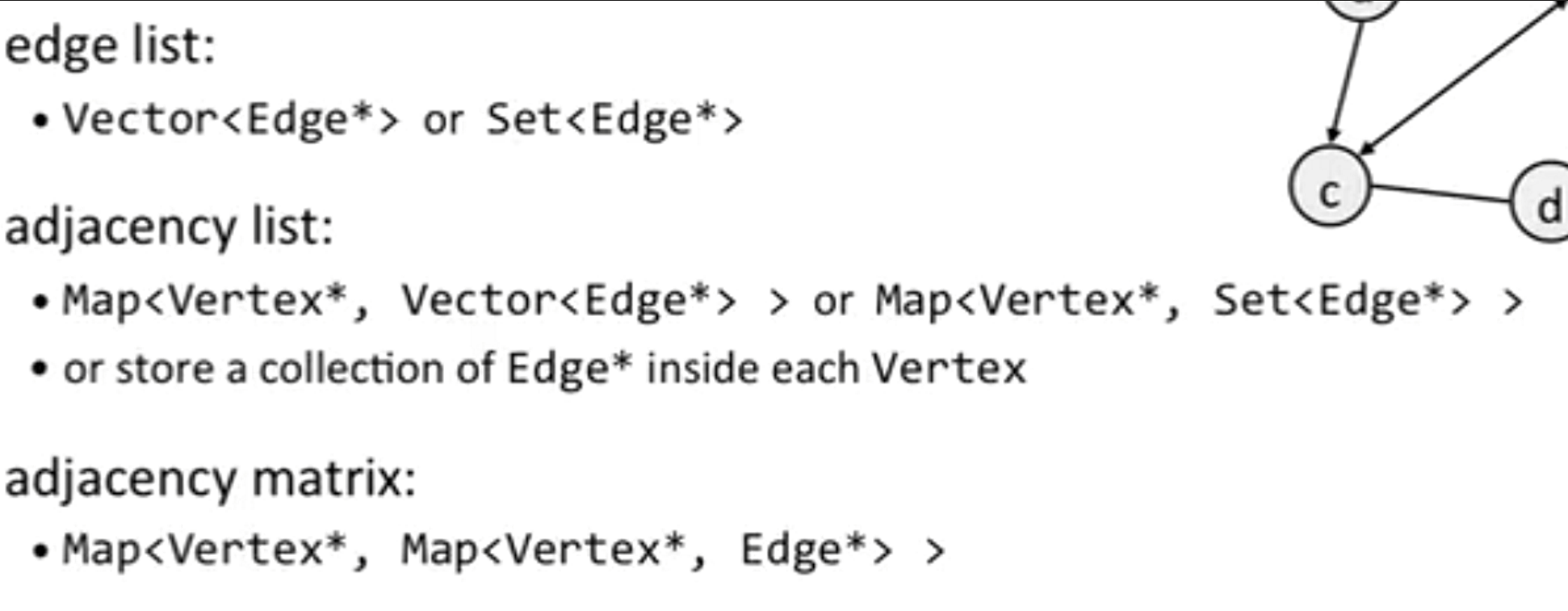
How to implement a graph?
edge list:使用一个容器存储边,每一个元素就是一条边,添加方便,但查询需要O(E)复杂度。
adjacency list:对于每一个顶点,维护一个邻接点列表,查询方便,添加新顶点需要更新其所有邻接点的列表。
adjacency matrix:邻接矩阵,查询特定边最方便,但在有些情况下会存在空间浪费,并且添加新顶点也更复杂。
Hashing
底层存储结构是一个数组,将要存储的数据本身经过变换,变换成一个hash code,作为存在数组里的下标,变换函数叫做hash function。 基本上所有操作都是O(1)复杂度。
解决collision
probing:若当前下标被占用,则顺延至下一个最近的未被占用的下标。
separate chaining:若一个下标有collision,就创建一个链表,存储所有对应此下标的元素。
当一个下标链表下的元素越来越多时,时间复杂度会增大,此时考虑扩容,也考虑将链表转换为树。
扩容
需要将所有元素都重新hash一遍。
Robin Hood Hashing
对probing hashing方法的补充。
实现
每个元素在插入的时候都记录其真实下标与原下标的距离,记为哈希代价。
插入元素时,若找到空位置,则插入,若位置已被占用,则比较哈希代价,若当前元素哈希代价较大,则占据此位置,原先的元素按照此规则重新插入到表内;若当前元素代价小于等于原元素,则顺延检查下一个元素,直到遇到空位置或者代价小于要插入元素的元素。
删除元素时,直接删除要插入的元素,并查看后一个元素,若后一个元素代价不为零,则移到前一个位置,同时代价减一,如此顺延,直到后一个元素的代价为零或者后一个元素是空位置。
查找元素时,从原位置开始找起,结束条件为:
找到元素。
当前位置元素的代价小于这个位置到原点的距离。
找到空位置。
数组大小有限时,若查找的位置超过capacity,则取模。
Inheritance
使用private关键字继承:有些时候子类并不完全支持父类的操作,或者父类的操作对子类不合实际,但子类又想继承父类的部分代码,就需要用private关键字继承,使得client端不能调用来自父类的函数。